
Autonomous Drone

CLIENT
MultiRotorResearch
We use End-2-End artificial intelligence to train computers human flying behavior to make drones avoid obstacles in real-time in even the most difficult situations.



Using human flying behavior our drone is more autonomous than competitors!
At Multi-rotor research, we strive to achieve fully autonomous flight through a diverse set of scenarios using a new innovative approach called End-2-End navigation. Instead of the competition that is separating tasks of autonomous flight into separate hand-coded subsystems. We use one single Artificial Intelligence model which can directly correlate image data to flight controls. As a result, the system is more coherent and flexible in finding solutions in the most complex scenarios.

CNN based ML path planning
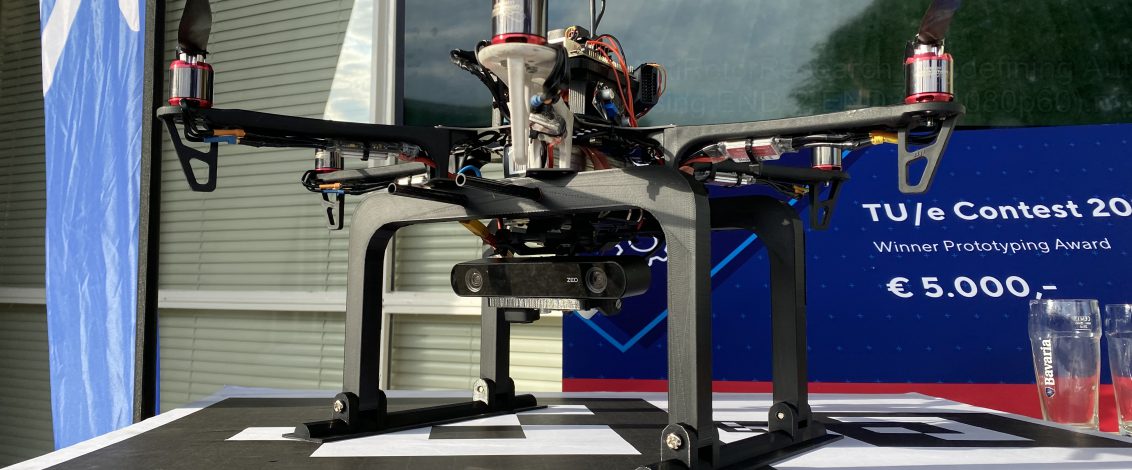
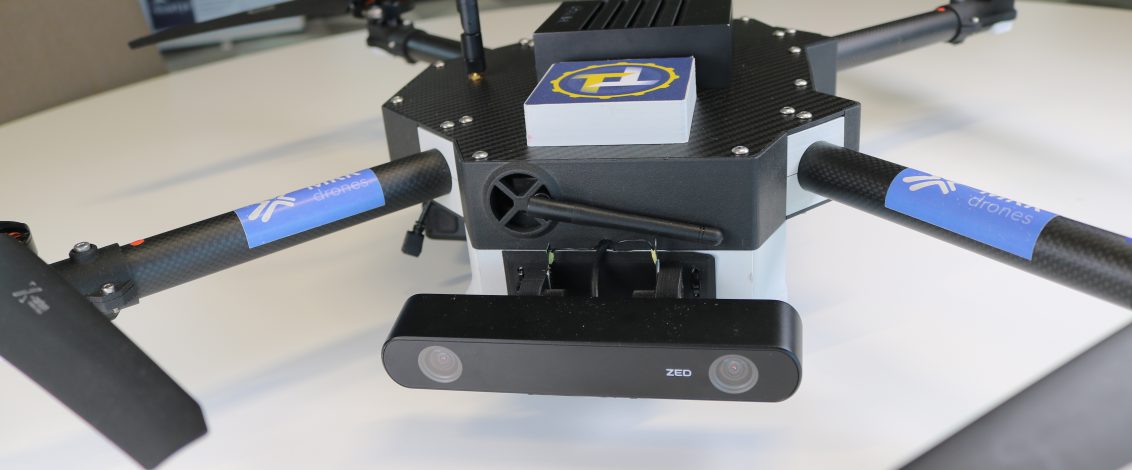
Our system uses a single CNN model that predicts directions that the drone needs to follow. We use keras and Python to run our custom designed model on the edge using a jetson nano mounted on the drone. Our drone is a hexacopter design making it able to carry large payloads. Using a ZED 2 stereo vision camera our AI is capable to see depth to make better predictions.
